素人ゲーム開発を垂れ流しつつ、覚醒に至るまでの記録や役立ち情報、愚痴を書くブログ。ちなみに前立腺の開発もやっている。
ラジアンについて。
いままでHSPのプラグインE3Dでの回転運動は、ラジアンは使わず、
そのままの値で罷り通って来ました。一回点するとちょうど360になり
360を超えたら0に戻す、これで完了。C++もそうだと思っていました。
しかしこれは残念なことにHSP版E3D出の話だったらしく、実際には
角度をラジアンに変換しなければならないようなのです。
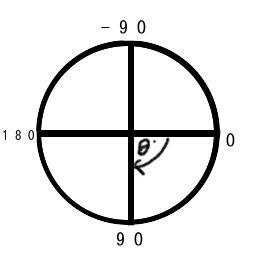
目みたいなのは度(°)を表します。角度の求め方は
二つの点が必要になります。つまりベクトルです。ベクトルから
は長さも求めることが出来ますが、同時に角度も求めることが
できます。
★角度を求める式★
// ------------------------------------------------------------
//軸は考えず回る座標x,yを使う。
//-------------------------------------------------------------
角度 = atan2(y,x) * 180.0f / M_PI;
ここで重要なのはatan2()にx,yの順ではなく逆と言うこと。
しかしこの角度を取得したからと言って、そのまま移動量
に加えてしまうと大変なことになってしまいます。
そのままの値で罷り通って来ました。一回点するとちょうど360になり
360を超えたら0に戻す、これで完了。C++もそうだと思っていました。
しかしこれは残念なことにHSP版E3D出の話だったらしく、実際には
角度をラジアンに変換しなければならないようなのです。
目みたいなのは度(°)を表します。角度の求め方は
二つの点が必要になります。つまりベクトルです。ベクトルから
は長さも求めることが出来ますが、同時に角度も求めることが
できます。
★角度を求める式★
// ------------------------------------------------------------
//軸は考えず回る座標x,yを使う。
//-------------------------------------------------------------
角度 = atan2(y,x) * 180.0f / M_PI;
ここで重要なのはatan2()にx,yの順ではなく逆と言うこと。
しかしこの角度を取得したからと言って、そのまま移動量
に加えてしまうと大変なことになってしまいます。
PR
COMMENT
ブログ内検索
カテゴリー
最新記事
(06/30)
(06/27)
(06/23)
(06/22)
(06/19)
最新コメント
プロフィール
HN:
kawaハギ
年齢:
37
性別:
男性
誕生日:
1989/07/03
職業:
無職
趣味:
ゲーム 音楽
自己紹介:
人類を5次元意識へ押しあげる為のゲームを
開発しています。
小学生3年頃から鬱を発症。対人恐怖症、醜形恐怖等で引きこもり。
生きる意味を長らく探し求め、ようやく答えを見つけスピリチュアル
にたどり着く。覚醒を数段階体験し現在は”もう一度”物理的な自立を目指しています。
開発しています。
小学生3年頃から鬱を発症。対人恐怖症、醜形恐怖等で引きこもり。
生きる意味を長らく探し求め、ようやく答えを見つけスピリチュアル
にたどり着く。覚醒を数段階体験し現在は”もう一度”物理的な自立を目指しています。
カウンター